
3.1 Representación en 3 dimensiones
REPRESENTACIÓN GRÁFICA
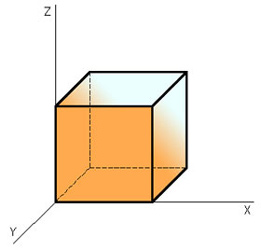
La representación de los objetos en tres dimensiones sobre una
superficie plana, de manera que ofrezcan una sensación de volumen se llama
Perspectiva. Se representan los objetos sobre tres ejes XYZ. En el eje Z,
se representa la altura. En el eje Y, se representa la anchura y en el eje X,
se representa la longitud.
Los distintos tipos de perspectivas dependen de la inclinación de los
planos Los sistema más utilizados son la isométrica, la caballera y la cónica.
Estudiaremos en este curso las dos primeras.
Perspectiva Isométrica. En ella los ejes quedan separados por un mismo
ángulo (120º). Las medidas siempre se refieren a los tres ejes que tienen su
origen en un único punto.

Perspectiva Caballera. En ella los ejes X y Z tienen un ángulo de 90º y el
eje Y con respecto a Z tiene una inclinación de 135º. En es te caso las
medidas en los ejes X y Z son las reales y las del eje Y tiene un coeficiente
de reducción de 0.5.
DIBUJAR EN PERSPECTIVA
En ambas perspectivas, el sistema más sencillo es llevar las tres
vistas principales sobre los planos formados por los ejes:
Alzado en el plano XZ.
Planta en el plano XY.
Perfil en el plano YZ.
Cada una de las aristas que forman las vistas se prolonga paralelamente
al eje que corresponda:
Horizontal paralelo al eje de las X.
Vertical paralelo al eje de las Z.
Profundidad paralelo al eje de las Y.
3.2 Visualización de Objetos
No cabe duda de que la representación tridimensional del territorio abre nuevas posibilidades en el ámbito geográfico. Pero el 3D por sí solo no está justificado. Las acciones para la navegación por una escena tridimensional son más complejas que las necesarias para la navegación en un plano. Cada aplicación de software ha resuelto de manera distinta, la manera de controlar la elevación, rotación y cabeceo del punto de vista, lo que requiere un aprendizaje por parte del usuario. Además, el tiempo real de las escenas exige más cantidad de recursos, tanto de cálculo como de datos.

La representación tridimensional es conveniente cuando la visualización de una tercera magnitud, típicamente la elevación del terreno, resulta útil para la interpretación de los datos que se quieren mostrar. Se presentan a continuación algunos de los usos más comunes.
GRAFICACION 2D GRAFICACION 3D


PROYECCIONES
Existen dos métodos básicos para proyectar objetos tridimensionales sobre una superficie de visión bidimensional. Todos los puntos del objeto pueden proyectarse sobre la superficie a lo largo de líneas paralelas o bien los puntos pueden proyectarse a lo largo de las líneas que convergen hacia una posición denominada centro de proyección. Los dos métodos llamados proyección en paralelo y proyección en perspectiva, respectivamente, se ilustran. En ambos casos, la intersección de una línea de proyección con la superficie de visión determinada las coordenadas del punto proyectado sobre este plano de proyección. Por ahora, se supone que el plano de proyección de visión es el plano z = 0 de un sistema de coordenadas del izquierdo.

PROYECCIÓN EN PARALELO
Una proyección en paralelo preserva dimensionar relativas de los objetos y esta es la técnica que se utiliza en dibujo mecánico para producir trazos a escala de los objetos en las dimensiones. Este método sirve para obtener vistas exactas de varios lados de un objeto, pero una proyección en paralelo no ofrece una presentación realista del aspecto de un objeto tridimensional.

Las vistas formadas con proyecciones en paralelo se pueden caracterizar de acuerdo con el angulo que la dirección de proyección forma con el plano de proyección. Cuando la dirección de proyección es perpendicular al plano de proyección, se tiene una proyección ortogonal.Una proyección que no es perpendicular al plano se denomina proyección oblicua.

PROYECCIÓN ORTOGONAL
La Proyección ortogonal es aquella cuyas rectas proyectantes auxiliares son perpendiculares al plano de proyección (o a la recta de proyección), estableciéndose una relación entre todos los puntos del elemento proyectante con los proyectados.
Existen diferentes tipos:
Vista A: Vista frontal o alzado
Vista B: Vista superior o planta
Vista C: Vista derecha o lateral derecha
Vista D: Vista izquierda o lateral izquierda
Vista E: Vista inferior
Vista F: Vista posterior

Las ecuaciones de transformación parea efectuar una proyección paralela ortogonal son directas.Para cualquier punto (x, y, z), el punto de proyección (Xp, Yp, Zp) sobre la superficie de visión se obtiene como Xp=X, Yp=y, Xp=0.
PROYECCIÓN OBLICUA.
Es aquella cuyas rectas proyectantes auxiliares son oblicuas al plano de proyección, estableciéndose una relación entre todos los puntos del elemento proyectante con los proyectados.

Una proyección Oblicua se obtiene proyectando puntos a lo largo de líneas paralelas que no son perpendiculares al plano de proyección. La figura muestra una proyección oblicua de un punto (x, y, z) por una línea de proyección a la posición (xp, Yp).

PROYECCIONES PERSPECTIVA
Para obtener una proyección en perspectiva de un objeto tridimensional, se proyectan puntos a lo largo de líneas de proyección se interceptan en el de centro de proyección.
En el centro de proyección está en el eje z negativo a una distancia d detrás del plano de proyección. Puede seleccionarse cualquier posición para el centro de proyección, pero la elección de una posición a lo largo del eje z simplifica los cálculos en las ecuaciones de transformación.
Podemos obtener las ecuaciones de transformaciones de una proyección en perspectiva a partir de las ecuaciones paramétricas que describen la línea de proyección de esta línea.
X’ = x –xu
Y’ = y- yu
Z’ = z-(z + d) u
El parámetro u toma los valores de 0 a 1 y las coordenadas (x’, y’, z’) representan cualquier posición situada a lo largo de la línea de proyección. Cuando u = 0.

Las ecuaciones producen el punto P en las coordenadas (x, y, z). En el otro extremo de la línea u = 1 y se tienen las coordenadas del centro de proyección, (0, 0,-d). Para obtener las coordenadas en el plano de proyección. Se hace z’ = 0 y se resuelven para determinar el parámetro u:
Este valor del parámetro u produce la interacción de la línea de proyección con el plano de proyección en (xp, yp, 0). Al sustituir las ecuaciones, se obtienen las ecuaciones de transformación de perspectiva.
Mediante una representación en coordenadas homogéneas tridimensionales, podemos escribir la transformación de la perspectiva en forma matricial.

Las coordenadas de proyección en el plano de proyección se calculan a partir de las coordenadas homogéneas como:
[xp yp zp 1] = [xh/w yh/w zh/w 1]
Cuando un objeto tridimensional se proyecta sobre un plano mediante ecuaciones de transformaciones de perspectiva, cualquier conjunto de líneas paralelas del objeto que no sean paralelas al plano se proyectan en líneas convergentes.

3.3 Transformación tridimensionales
[x´,y´,z´,1]=[x, y, z, 1]










 3.4 Lineas y superficies curvas
3.4 Lineas y superficies curvas
Fuentes:

3.3 Transformación tridimensionales
MÉTODO DE TRASLACIÓN
En una representación coordenada homogénea tridimensional, un punto es trasladado (fig.11.1) de la posición (x,y,z) a la posición (x’,y’,z’) con la Operación matricial.
[x´,y´,z´,1]=[x, y, z, 1]
(11.1)
Los parámetros Tx, Ty, Tz, que especifican distancias de traslación para las coordenadas, reciben la asignación de cualquier valor real. La representación matricial de la ecuación 11.1 es equivalente a las tres ecuaciones
x’ =x + Tx, y’ = y + Ty, z’ =z + Tz
Un objetivo se traslada en tres dimensiones transformando cada punto definidor del objeto. La traslación de un objeto representada como un conjunto de superficies poligonales se efectúa trasladando los valores coordenados para cada vértice de cada superficie. El conjunto de posiciones coordenadas trasladadas de los vértices define entonces la nueva posición del objeto.

MÉTODO DE ESCALACIÓN
Operación matricial.
[x´,y´,z´,1]=[x, y, z, 1]

Los parámetros de escalación Sx, Sy, Sz, se les asigna asignación cualquier valor positivo.
Cuando la transformación 11-3 se aplica para definir puntos en un objeto, el objeto se escala y se desplaza en relación con el origen coordenado.

MÉTODO DE ROTACIÓN
Para especificar una transformación de rotación de un objeto, se debe designar un eje de rotación (en torno al cual se hará girar el objeto) y la cantidad de rotación angular. En aplicaciones bidimensionales, el eje de rotación siempre es perpendicular al plano xy. En tres dimensiones, un eje de rotación puede tener cualquier orientación espacial.los ejes de rotación más fáciles de manejar son aquellos que son paralelos a los ejes coordenados. Asimismo, podemos valernos de las rotaciones en torno a los tres ejes coordenados con el fin de producir una rotación en torno a cualquier eje de rotación especificado en forma arbitraria.
Las direcciones de rotación positivas en torno a los ejes coordenados son en sentido contrario al del reloj, como se observa a lo largo de la posición positiva de cada eje en dirección del origen.
Operación matricial de rotación en el eje Z
El parámetro Ѳ especifica el ángulo de rotación.
[x´,y´,z´,1]=[x, y, z, 1]
Imagen que muestra la rotación de un objeto en torno al eje Z.

Operación matricial de rotación en el eje X
[x´,y´,z´,1]=[x, y, z, 1]

Operación matricial de rotación en el eje y
[x´,y´,z´,1]=[x, y, z, 1]

REPRESENTACIÓN EN UN GRÁFICA 3D DE LOS TRES MÉTODOS ANTERIORES:

Las representaciones de líneas y superficies son de aplicación a los procesos de diseño de formas y de desarrollo de planos constructivos. A los tradicionales puntos de vista de si debe determinarse la enseñanza para todas las aplicaciones o por el contrario si debe consistir en una formación de gran contenido geométrico-proyectivo se une la utilización de ordenadores. Para conjugar estas tendencias el autor expone la representación de curvas y superficies de aplicación técnica: Punto, recta, plano, circunferencia, otras curvas planas, hélice cilíndrica, poliedros regulares, superficies radiadas, esfera, etc. El estudio de algunas superficies como las desarrollables, muy importantes en los trazados de construcción naval. Finalmente analiza las ecuaciones analíticas, absolutamente imprescindibles para su representación por ordenador.
Los métodos más eficientes para determinar la visibilidad de objetos con superficies curvas son la proyección de rayos y los métodos basados en árbol octal. Con la proyección de rayos, calculamos las intersecciones entre los rayos y las superficies y localizamos la distancia de intersección más pequeña a lo largo del trayecto del rayo. Con los arboles octales, simplemente exploramos los nodos de adelante hacia atrás para localizar los valores de color de superficie. Una vez definida una representación en árbol octal a partir de las definiciones de entrada de los objetos, todas las superficies visibles se identifican con el mismo tipo de procesamiento.
No es necesario realizar ningún tipo especial de consideración para diferentes tipos de superficies, ya sean curvas o de cualquier otra clase. Una superficie curva también puede aproximarse mediante una malla poligonal, y entonces podemos utilizar algunos de los métodos de identificación de superficies visibles previamente expuestos. Pero para algunos objetos, como las esferas, puede que sea más eficiente, además de mas preciso utilizar el método de proyección de rayos y las ecuaciones que describen la superficie curva.
Representación de superficies curvas Podemos representar una superficie como una ecuación implícita de la forma
f(x,y,z)=0
o con una representación perimétrica. Las superficies de tipo spline, por ejemplo, se suelen describir mediantemente ecuaciones para métricas.
En algunos casos, resulta útil obtener una ecuación explicita de la superficie, como por ejemplo una ecuación que nos de la altura con respecto a un plano de tierra xy: Z=f(x,y) Muchos objetos de interés, como las esferas, elipsoides, cilindros y conos tienen representación mediante ecuaciones cuadráticas.
Estas superficies se suelen utilizar comúnmente para modelar estructuras moleculares, cojinetes, anillos y ejes. Los algoritmos de líneas de barrido y de proyección de rayos requieren a menudo técnicas de aproximación numérica para resolver la ecuación de la superficie en el punto de intersección con una línea de barrido o con un rayo de un pixel. Se han desarrollado diversas técnicas, incluyendo cálculos en paralelo e implementaciones hardware de gran velocidad, para resolver las ecuaciones de intersección con superficies curvas para los objetos más comúnmente utilizados.
Fuentes:
- http://iestomasmorales.org/Departamentos/tecnologia/doc/doc/3ESO_Representacion%20Grafica.pdf
- http://graficacionporcomputadora.blogspot.mx/2013/05/3_7.html
- http://graficacionporcomputadora.blogspot.mx/2013/05/3_3557.html
- http://www.wikilearning.com/curso_gratis/modelado_geometrico-3_3_2_lineas_y_superficies_curvas_a/29040-17
Playtech signs new mobile casino app - Jammy Hub
ResponderEliminarPlaytech has launched 대구광역 출장마사지 a new mobile casino 포천 출장안마 app, called 대전광역 출장샵 “Sarat,” and it includes a range of casino 대구광역 출장안마 games for iPhone, Android and iPad. 영주 출장샵 The app is available on